[DL/Timeseries] 트랜스포머 [DL/Timeseries] Transformer
‘Attention Is All You Need’ 논문을 리뷰하고 Attention, LayerNorm, Positional Encoding에 관한 세부사항을 보완한다.
Review ‘Attention Is All You Need ‘and fill details of Attention, LayerNorm, Positional Encoding.
논문 바로가기 : Attention Is All You Need (2017)
Attention 알고리즘을 활용해 시계열 데이터를 병렬적으로 처리하는 신경망
목차
한눈에 살펴보기
1. 들어가며
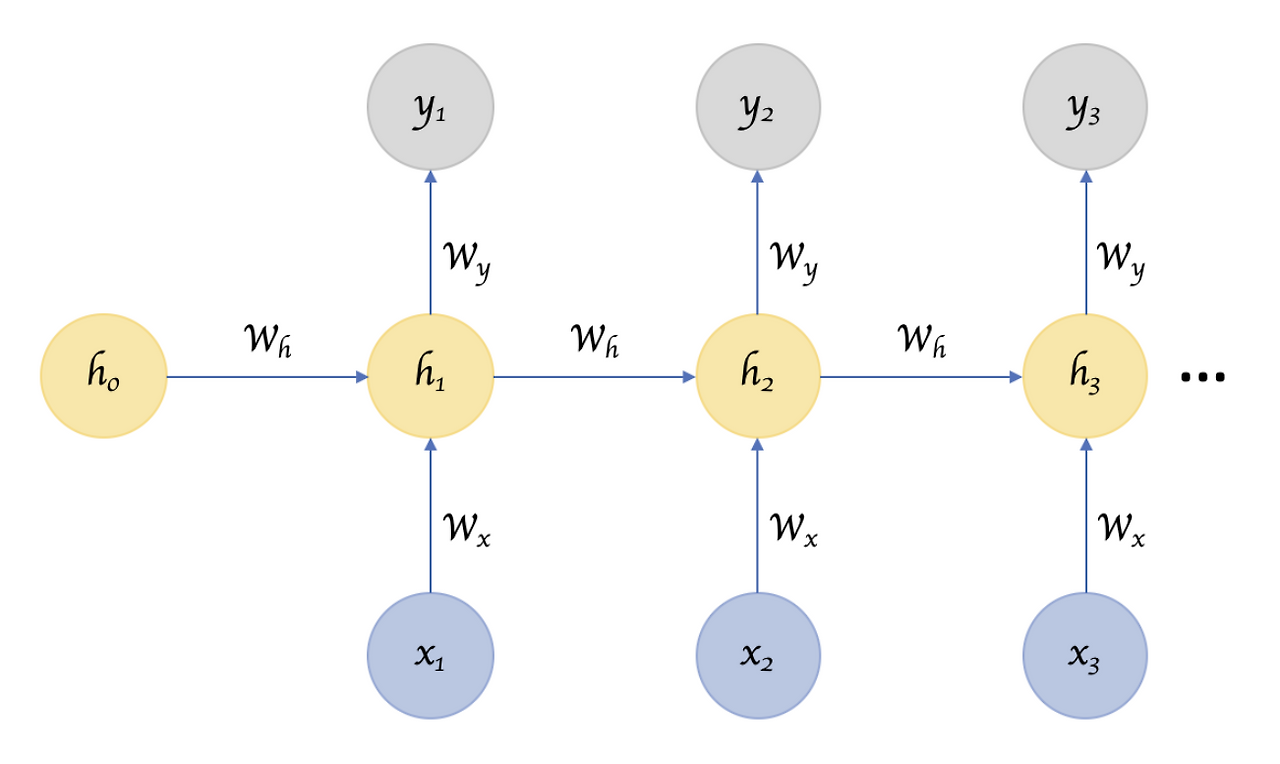
트랜스포머 이전 시계열 데이터 처리에는 RNN, LSTM, GRU 와 같은 신경망이 널리 이용됐다.
출처: https://brunch.co.kr/@jean/5
RNN(Recurrent Neural Network)는 시계열 데이터의 순차적인 시간을 인식하고, 이전의 데이터를 효과적으로 반영하기 위해 입력으로 데이터($x_{t}$)와 이전의 은닉 정보($h_{t-1}$)를 종합해 출력값($y_{t}$)을 계산한다. RNN은 모든 시간대에서 동일한 신경망 파라미터를 공유하는데, 이는 입력 데이터의 길이가 길어질수록 성능이 저하되는 장기 의존성 문제를 야기한다. 또한 순차적으로 데이터를 입력받아야하기 때문에 병렬화가 불가능해 연산량이 많았으며, 출력 데이터와 입력 데이터의 길이가 같아야 하는 구조적 문제가 존재했다.
“Attention Is All You Need(2017)”에서 소개된 트랜스포머 모델은 기존에 주류로 사용되던 재귀 신경망 구조를 완전히 배제하고, 어텐션 메커니즘만으로 입력과 출력 간의 장거리 의존성을 포착하여 시계열 데이터를 효율적으로 처리한다. 이 접근법은 병렬 처리가 가능하면서도 장기적인 문맥 정보를 더 정확히 반영한다.
2. 전체 구조도
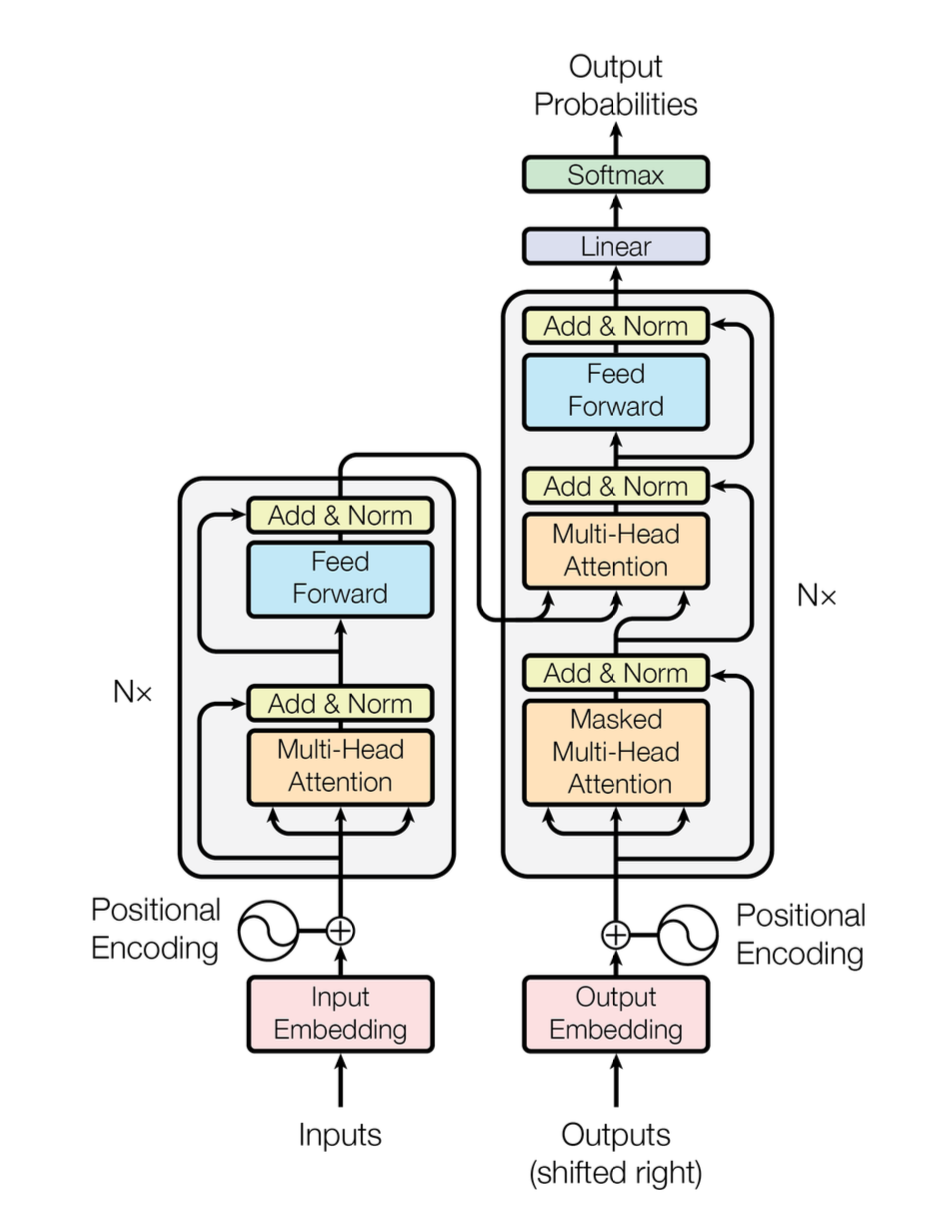
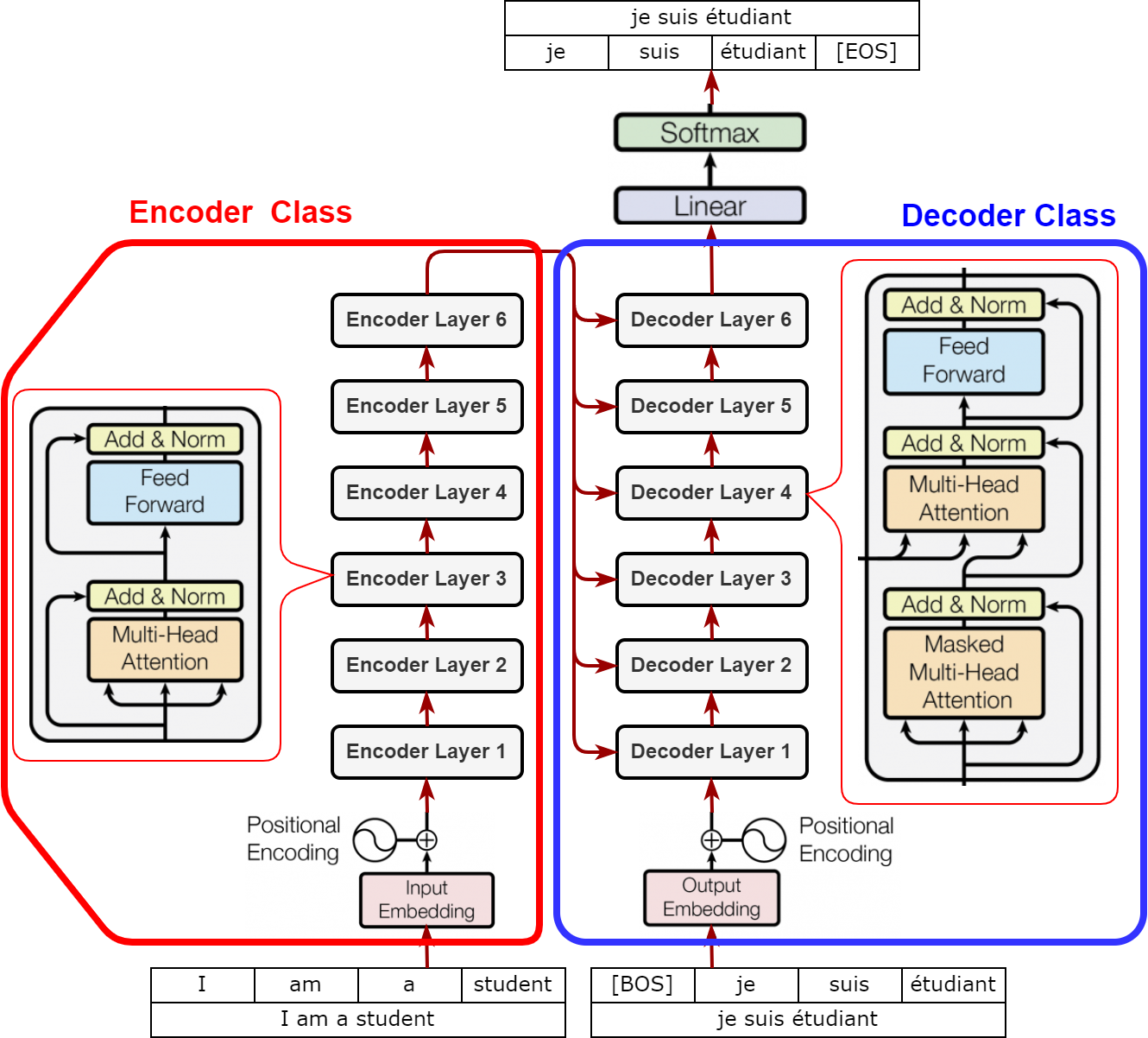
트랜스포머 모델은 인코더-디코더 구조로 이루어져 있다. 인코더와 디코더는 각각 공통 레이어를 층층이 쌓아 놓은 구조로, 레이어는 멀티 헤드 어텐션과 FFN로 구성되어 있다. 입력되는 데이터는 포지셔널 인코딩을 추가해 데이터의 순서 정보를 포함한다.
- Encoder
인코더는 총 6개의 레이어로 이루어져 있고, 각 레이어는 한 번의 멀티 헤드 셀프 어텐션, 한 번의 FFN으로 구성되어 있다. 두 보조 레이어는 공통적으로 잔차를 더하고, 레이어를 정규화하는 과정을 수행한다. 이를 정리하면 다음과 같은 정의가 성립한다.
\[LayerNorm(x + Sublayer(x))\]- Decoder
디코더는 인코더와 마찬가지로 총 6개의 레이어로 이루어져 있고, 각 레이어는 두 번의 멀티 헤드 어텐션과 FFN으로 구성되어 있다. 인코더와 달리, 디코더의 셀프 어텐션은 이후의 정보를 참고하지 못하도록 마스킹되어 있으며 인코더의 출력값과 디코더의 셀프 어텐션 값을 모델링하는 어텐션으로 나누어져 있다.
- FFN
뒤에 설명할 어텐션, 포지셔널 인코딩에 비해 단순한 구조를 갖고 있기에 여기서 정의한다. ReLU를 활성화 함수로 갖는 두 층짜리 앝은 전연결 신경망이다.
\[FFN(x) = ReLU(xW_1 + b_1)W_2 + b_2\]3. Attention
어텐션 알고리즘은 입력 시퀀스 벡터 집합에서 중요한 부분에 더 큰 가중치를 주는 연산이다. 과거에 Seq2Seq 모델들은 context vector라는 고정된 벡터를 만들어 입력 벡터의 전체 요소를 하나에 몰았다. context vector는 고차원 입력을 저차원으로 압축하기 때문에 표현력이 제한적이었다. 또한 이 벡터는 추상적이어서, 모델의 작동 원리를 해석하기 어렵다는 한계가 있었다. 어텐션 알고리즘은 요소 사이의 관계를 집중적으로 모델링해 이런 문제를 극복했다.
3-1 Attention 구성요소
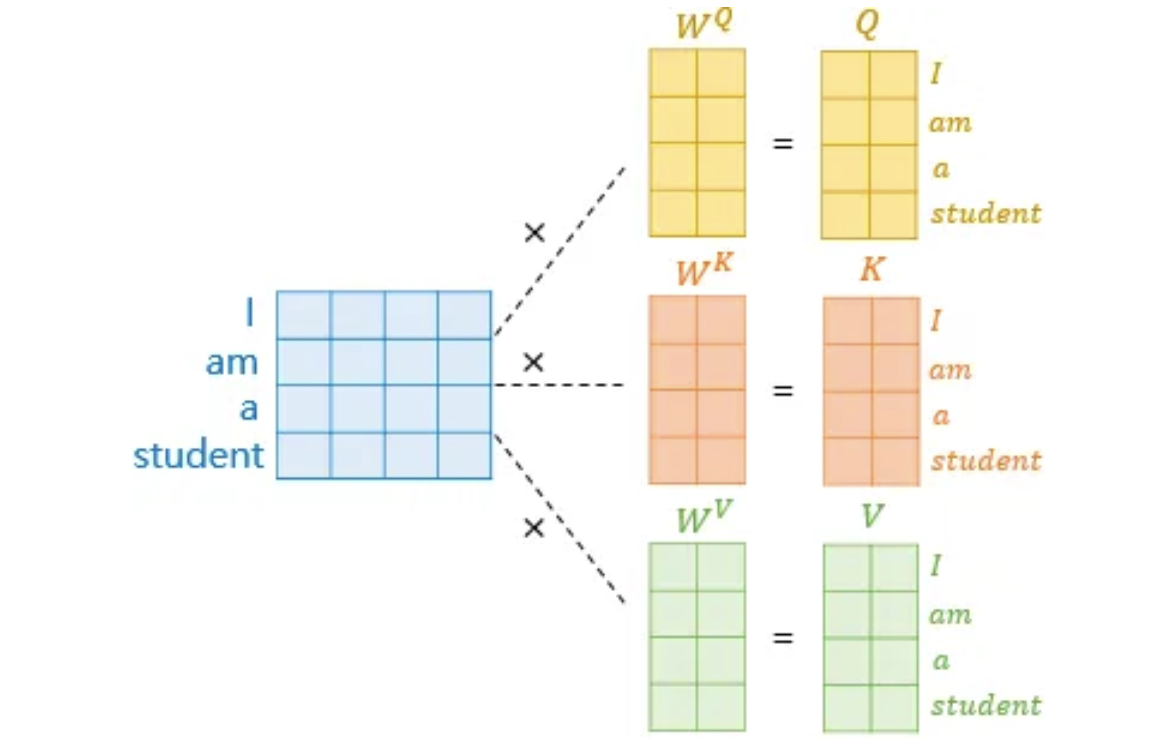
Attention 알고리즘은 Query, Key, Value를 학습한다.
- Query(Q): 현재 단어(또는 상태)에서 만들어지는 벡터로, 다른 단어와의 연관성을 탐색하는 기준이 된다.
- Key(K): 각 단어가 가진 고유한 특징(주소 역할)을 나타내며, Query가 어떤 단어를 참고해야 하는지 결정한다.
- Value(V): 실제 정보(내용)를 담고 있으며, Attention 가중치로 평균화되어 최종 출력으로 전달된다.
Query를 기준으로 탐색하기 때문에, (Key와 Value)는 동일한 입력 데이터가 필요하다.
- 🌟 Query, Key, Value의 파라미터화
출처: https://wikidocs.net/31379
트랜스포머 이전의 Attention은 주로 LSTM 기반 Seq2Seq 모델에서 사용되었으며, 이때 Query, Key, Value는 인코더와 디코더의 은닉 상태를 그대로 활용하여 계산되었다. 반면 본 논문에서는 Query, Key, Value의 역할과 학습 목적을 보다 명확히 하기 위해, 각기 다른 가중치 행렬 $W^Q, W^K, W^V$를 통해 입력을 선형 변환하여 직접적으로 파라미터화(projection)하였다. Query와 Key에는 $d_{model}$ x $d_k$ 크기의 파라미터가, Value에는 $d_{model}$ x $d_v$ 크기의 파라미터가 사용되며, 일반적으로 $d_k, d_v$ « $d_{model}$의 관계가 성립해 학습의 안정성이 높아진다.
- Self-Attention
Self-Attention은 동일한 시퀀스 내에 있는 요소와 요소 사이 관계를 알고 싶을 때 사용한다. 이때 Q,K,V는 전부 동일한 데이터를 이용한다. 셀프 어텐션은 본 논문 이전에 소개된 개념이지만, 트랜스포머의 대중화 이후 주류에 자리잡았다.
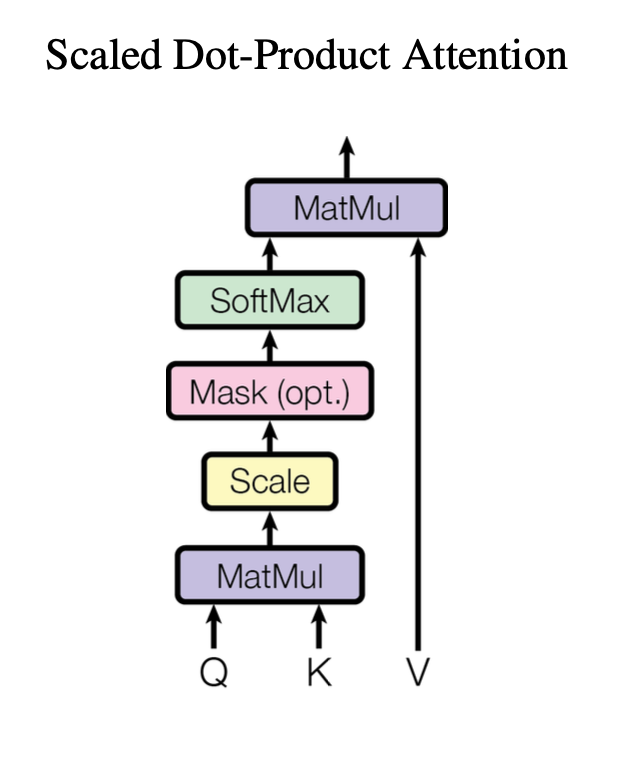
3-2 Scaled Dot-Product Attention
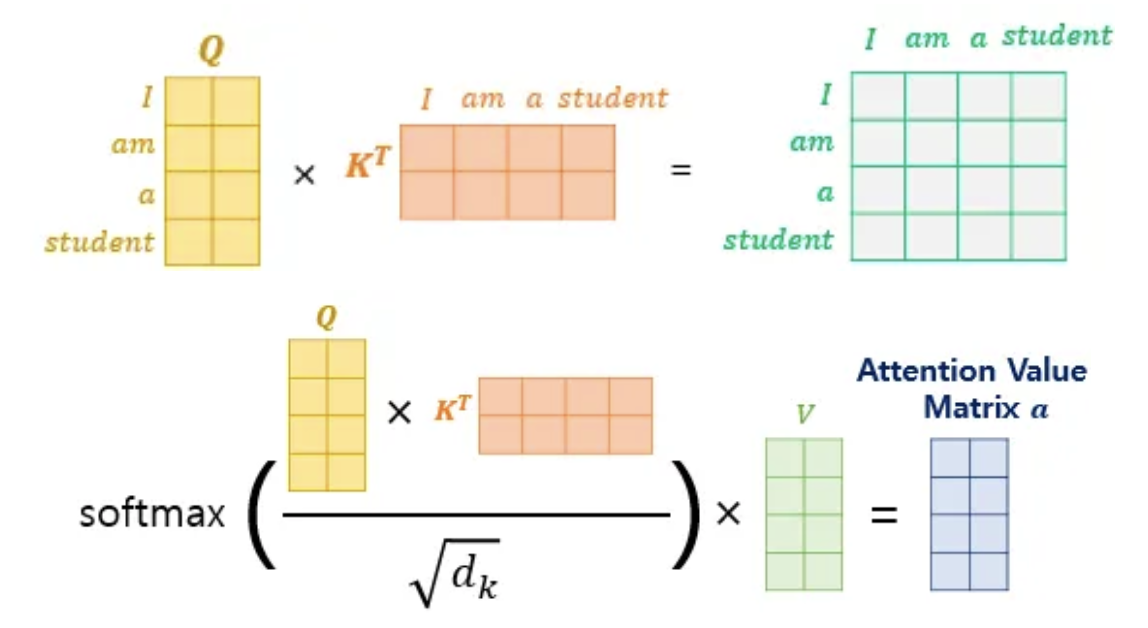
출처: https://wikidocs.net/31379
위 수식를 연산단위로 쪼개보면 다음과 같다.
1. Q와 K 사이의 유사도를 구해 Attention score를 구한다.
2. 1에서 구한 Attention score를 임베딩 크기의 루트값로 나눠 임베딩 차원이 커짐에 따라 값이 증가하는 것을 막는다.
3. 스케일링이 끝난 Attention score에 softmax를 취해 확률화시킨다.
4. V와 각 어텐션 가중치를 곱해 최종 값을 얻는다.
Attention score를 구하는 1-2 과정은 본 논문에서 처음 제시된 방법으로, 이 밖에도 Attention score을 구하는 다양한 방법이 존재한다. (ex. Additive Attention)
3-3 🌟 Multi-Head Attention
Q와 K,V 사이의 연관성을 단일한 관점에서만 포착하기에는 한계가 있다. 예를 들어, 어떤 경우에는 주어와 동사의 장거리 의존성이 중요할 수 있고, 다른 경우에는 인접 단어 간의 의미적 유사성이 더 중요할 수 있다. 이러한 서로 다른 관점을 반영하기 위해 본 논문은 Attention 연산을 여러 개의 독립적인 공간(Head)에서 병렬적으로 수행하고, 그 결과를 결합하는 Multi-Head Attention을 제안한다.
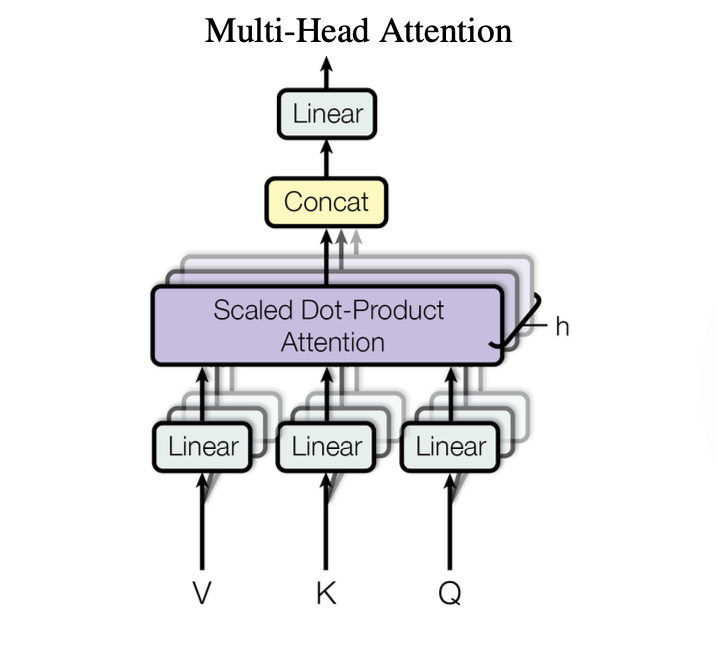
출처: Vaswani et al., 2017
각 Head는 Scaled Dot-Product Attention을 수행하여 하나의 Attention Value 행렬을 산출한다. 따라서 Multi-Head Attention에서는 Head의 개수 h에 대응하는 h개의 Attention Value 행렬이 생성된다. 이를 효과적으로 통합하기 위해, 모든 Attention Value 행렬을 이어붙인(concatenate) 후 가중치 행렬 $W^O \in \mathbb{R}^{hd_v \times d_{\text{model}}}$ 을 곱하여 프로젝션을 수행한다. 그 결과, 여러 Head가 포착한 다양한 의미적 관계가 집약된 최종 Attention Value 행렬을 얻을 수 있다.
수식으로 나타내면 다음과 같다.
\[\text{MultiHead}(Q, K, V) = \text{Concat}(\text{head}_1, \dots, \text{head}_h) W^O\] \[\text{where} \quad \text{head}_i = \text{Attention}(Q W_i^Q, \; K W_i^K, \; V W_i^V)\]3-4 Transformer의 Attention
Transformer에는 self-attention, enc-dec attetion이 있다.
출처: Vaswani et al., 2017
1. Self-Attention
Self-Attention은 인코더와 디코더 레이어의 첫 번째 어텐션 블록이다. 디코더는 미래 정보를 사용하지 않기 위해 마스킹을 적용하여 정보 누수를 방지한다.
2. Encoder-Decoder Attention
Encoder-Decoder Attention은 Q를 이전 디코더 레이어의 출력값으로, K와 V를 인코더의 최종 출력값으로 사용한다. 이 과정을 통해 디코더는 모든 입력 시퀀스의 정보를 손실 없이 접근할 수 있다.
4. 🌟 Positional Encoding
기존의 시퀀스 모델들은 순차적으로 데이터를 모델에 집어넣어 데이터에게 순서 정보를 주었다. 트랜스포머는 시퀀스 전체를 일괄적으로 넣기 때문에 데이터 자체만으로는 위치 정보가 존재하지 않는다. 본 논문은 포지셔널 인코딩을 통해 데이터에 효과적으로 순서 정보를 주입했다.
\[PE_{(pos, 2i)} = \sin\!\big(pos \cdot w_i\big), \quad PE_{(pos, 2i+1)} = \cos\!\big(pos \cdot w_i\big) \quad\] \[\text{where } w_i = 10000^{-\tfrac{2i}{d_{\text{model}}}}\]- $pos$: 시퀀스 상 위치 (0, 1, 2, …)
- $i$: 임베딩 차원 인덱스
- $d_{\text{model}}$: 임베딩 차원 크기
이렇게 만든 $PE \in \mathbb{R}^{\text{sequence length} \times d_{\text{model}}}$를 입력 임베딩 $X$에 더해 순서 정보를 데이터에 더해준다.
\[Z = X + PE\]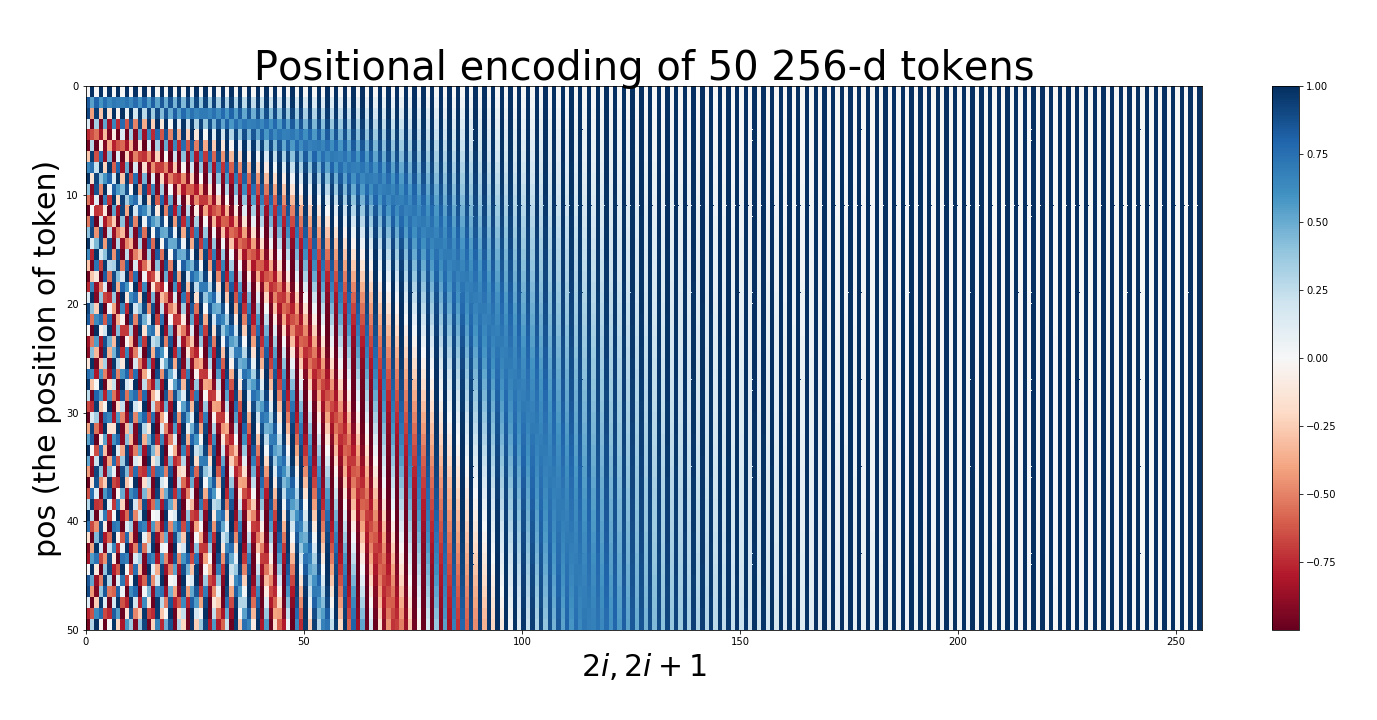
포지셔널 인코딩은 어떻게 위치 관계를 나타내는가?
포지셔널 인코딩은 사인과 코사인 함수를 이용하여 효과적으로 위치 관계를 모델링한다. 이러한 단순한 주기 함수의 조합이 위치 정보를 표현할 수 있는 이유는 다음과 같다. 포지셔널 인코딩은 두 가지 위치 정보를 전달한다. 첫째, 포지셔널 벡터 간의 내적은 어텐션 점수에 상대적 거리를 직접 반영한다. 둘째, 벡터 이동은 특정 위치와 무관하게 거리 차이에 따라 동일한 변환으로 표현된다.
(1) 포지셔널 벡터 간의 내적
동일한 주파수 $\omega_r$를 쓰는 포지셔널 벡터 두 개를 가정한다.
\[p_r(i) = [\sin(\omega_r i), \cos(\omega_r i)], \quad p_r(j) = [\sin(\omega_r j), \cos(\omega_r j)]\]두 벡터를 내적 해보면,
\[p_r(i) \cdot p_r(j) = \sin(\omega_r i)\sin(\omega_r j) + \cos(\omega_r i)\cos(\omega_r j) = \cos\big(\omega_r (i-j)\big)\]실제 포지셔널 인코딩은 여러 주파수 $\omega_1, \dots, \omega_m$을 써서 벡터를 구성하기 때문에, 실제 전체 내적은 아래와 같다.
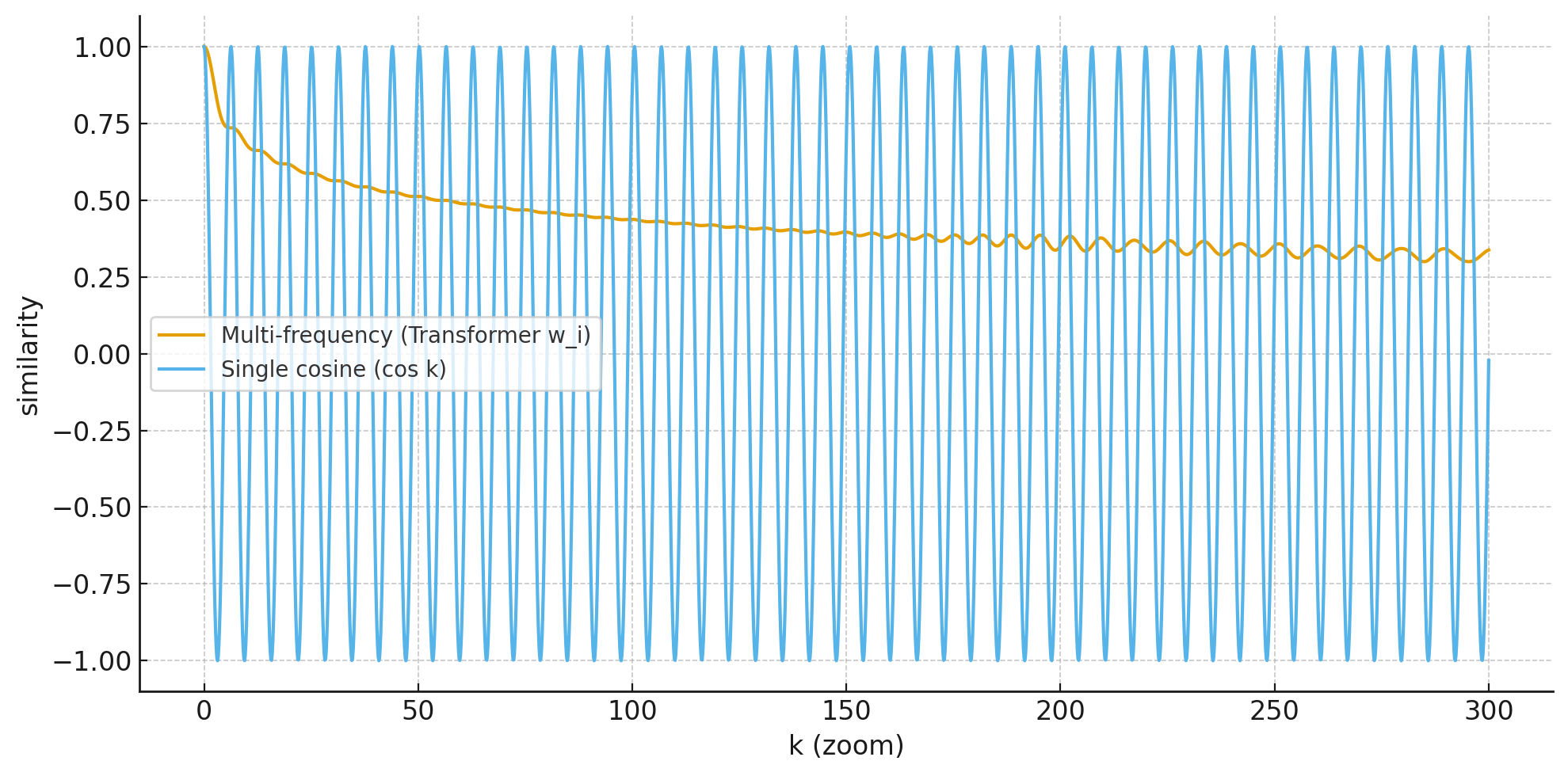
\[\mathbf{p}(i) \cdot \mathbf{p}(j) = \sum_{r=1}^m \cos(\omega_r (i-j))\]즉, 내적값은 $i, j$의 절대 위치가 아니라 차이 $k=(i−j)$에만 의존하며, 다양한 $w_i$ 값을 이용해 단조적인 거리 값을 근사한다. $w_i$은 cos의 주기를 다양하게 만들어 k에 따른 내적값의 변화를 효과적으로 모델링해 가까운 단어끼리는 내적값이 크고, 멀리 떨어지면 작아지는 패턴을 생성한다.
포지셔널 인코딩 사이의 내적은 셀프 어텐션에서 포함되어 Q와 K 사이의 유사도를 구할 때 거리 정보를 전달한다.
- 셀프 어텐션 식
- 내용 vs 내용 ($X–X$) : 단어 의미 기반 유사도
- 내용 vs 위치 ($X–P, P–X)$ : 단어 의미와 위치가 섞인 신호
- 위치 vs 위치 ($P–P$) : 거리 전용 신호
(2) 포지셔널 인코딩의 거리 차가 특정 위치 pos와 무관하다.
포지셔널 인코딩(Positional Encoding)의 핵심적인 성질 중 하나는 위치 간 상대적 거리 정보가 절대 위치와 무관하게 유지된다는 점이다. 이는 모델이 단순히 위치를 식별하는 것에 그치지 않고, 상대적 거리 패턴을 일반화하여 포착할 수 있음을 의미한다.
우선, $d_{\text{model}}=2$인 단순한 포지셔널 인코딩 벡터를 생각해보자. 특정 위치 pos에서의 인코딩은 다음과 같이 정의된다.
\[\begin{bmatrix} PE_{(pos,2i)} \\ PE_{(pos,2i+1)} \end{bmatrix} = \begin{bmatrix} \sin(\omega_i \cdot pos) \\ \cos(\omega_i \cdot pos) \end{bmatrix}\]이제 pos+k (offset k)에 해당하는 포지셔널 벡터를 전개하면, 삼각함수의 덧셈정리에 의해 다음과 같은 식을 얻는다.
\[\begin{bmatrix} \sin(\omega_i (pos+k)) \\ \cos(\omega_i (pos+k)) \end{bmatrix} = \begin{bmatrix} \sin(\omega_i \cdot pos)\cos(\omega_i \cdot k) + \cos(\omega_i \cdot pos)\sin(\omega_i \cdot k) \\ \cos(\omega_i \cdot pos)\cos(\omega_i \cdot k) - \sin(\omega_i \cdot pos)\sin(\omega_i \cdot k) \end{bmatrix}\]이를 행렬 곱 형태로 다시 쓰면 다음과 같다.
\[\begin{bmatrix} \sin(\omega_i (pos+k)) \\ \cos(\omega_i (pos+k)) \end{bmatrix} = \begin{bmatrix} \cos(\omega_i \cdot k) & \sin(\omega_i \cdot k) \\ -\sin(\omega_i \cdot k) & \cos(\omega_i \cdot k) \end{bmatrix} \begin{bmatrix} \sin(\omega_i \cdot pos) \\ \cos(\omega_i \cdot pos) \end{bmatrix}\]즉, 위치를 k만큼 이동시키는 연산은 단순히 각 주파수 $\omega_i$에 대해 고정된 회전 행렬을 곱하는 것과 같다. 이 행렬은 pos에는 의존하지 않고, 오직 거리 $k$와 주파수 $\omega_i$만으로 결정된다.
이는 포지셔널 인코딩이 단순히 절대 위치를 구분하는 역할을 넘어, 시퀀스 내의 상대적 거리 정보를 안정적으로 제공한다는 점에서 중요하다. 두 위치 간의 관계가 절대 위치와 무관하게 동일한 변환으로 표현되므로, 모델은 한 번 학습한 특정 거리 k에 대한 패턴을 시퀀스의 어느 구간에서도 재사용할 수 있다. 이러한 성질은 새로운 입력 길이나 이전에 관찰하지 못한 위치에서도 동일한 상대적 규칙을 적용할 수 있게 해주며, 결과적으로 Transformer가 길이 일반화(length extrapolation) 능력을 갖도록 한다. 나아가, Attention이 내적 연산을 통해 두 위치의 관계를 비교할 때, 포지셔널 인코딩은 자동으로 상대 거리 기반의 바이어스를 제공한다. 덕분에 모델은 문법적으로 가까운 단어들 간의 단기 의존성과, 문장 처음과 끝 같은 장거리 의존성을 모두 효율적으로 학습할 수 있다.
5. Layer Normalization
논문 바로가기 : Layer Normalization (2016)
입력 데이터 정규화는 학습의 효율성과 안정성을 높이는 가장 기본적이면서도 강력한 방법론이다. 그러나 이러한 정적 정규화(예: 입력 전처리)는 학습 과정에서 레이어 내부적으로 발생하는 불안정성을 동적으로 제어하지 못한다. 이를 해결하기 위해 Layer Normalization이 제안되었다. 특히 시퀀스 모델과 좋은 시너지를 보이는 Layer Normalization은 학습 과정에서 은닉 상태에 직접 적용되며, 은닉 차원$(d_{\text{model}})$을 기준으로 정규화를 수행한다.
Layer Normalization은 (1) 은닉 상태 정규화, (2) 표현력 강화를 위한 아핀 변환으로 구성된다.
(1) 은닉 상태 정규화
모델 입력이 $X \in \mathbb{R}^{B \times T \times d_{\text{model}}}$ (배치, 시퀀스 길이, 특성 차원)이라면, LayerNorm은 각 샘플의 각 토큰 벡터 $x_{b,t,:} \in \mathbb{R}^{d_{\text{model}}}$를 기준으로 정규화를 수행한다.
(2) 표현력 강화를 위한 아핀 변환
정규화 과정에서 값의 범위가 제한되므로, 네트워크의 표현력을 확보하기 위해 선형 변환을 추가한다. 학습 가능한 파라미터 $\gamma, \beta \in \mathbb{R}^{d_{\text{model}}}$를 도입하며, 이들은 모든 토큰에서 공유된다.
5-1. LN 위치에 관한 최신 동향
논문 바로가기 : On Layer Normalization in the Transformer Architecture (2020)
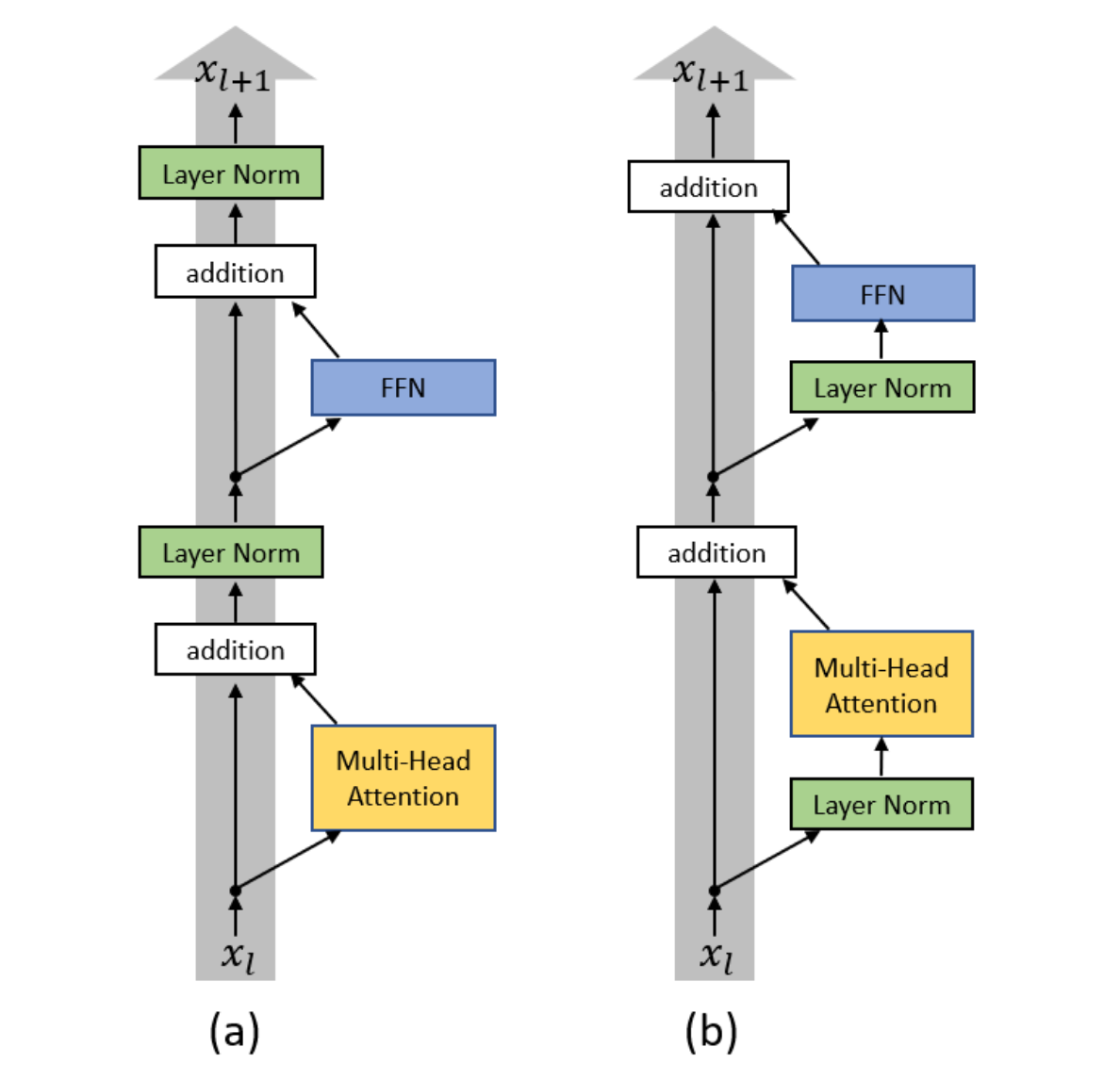
출처: On Layer Normalization in the Transformer Architecture
본 논문에서는 멀티-헤드 어텐션(Multi-Head Attention)과 피드포워드 네트워크(FFN) 뒤에 잔차 연결(residual connection)을 더하고 레이어 정규화를 수행하는 Post-LN 구조(a)를 제안하였다. 그러나 오늘날에는 레이어 정규화를 먼저 적용한 후 멀티-헤드 어텐션이나 FFN 블록을 쌓는 Pre-LN 구조(b)가 주로 사용된다.
Post-LN은 초기화 단계에서 그래디언트가 불안정하여 학습률 설정에 민감하게 반응한다. 이로 인해 매우 작은 학습률에서 시작해 점진적으로 학습률을 높여가는 warm-up 단계가 선행되어야 안정적인 학습이 가능하다. 반면 Pre-LN은 전반적으로 그래디언트가 안정적이므로, 별도의 warm-up 절차 없이도 안정적으로 학습된다.
Write the English content here.